Система управления позиционированием роботом, диплом по информатике
Получите бесплатно демо-версию Демо-версия - дипломная работа, в котрой удалена часть текста, рисунков, таблиц.Посмотреть все услуги дипломной работы на электронную почту.
Введите адрес электронной почты и нажмите "Отправить"
 Информационная система обслуживания заявок сотрудников строительной компании, диплом по информатике в экономике2 000 ₽
Информационная система обслуживания заявок сотрудников строительной компании, диплом по информатике в экономике2 000 ₽ Разработка методики выбора средств защиты платёжных карт, ВКР защита информации 2 000 ₽
Разработка методики выбора средств защиты платёжных карт, ВКР защита информации 2 000 ₽ Методика обеспечения защиты информации WEB-сервера от XSS атак на основе многокритериального выбора, ВКР безопасность информационных систем2 000 ₽
Методика обеспечения защиты информации WEB-сервера от XSS атак на основе многокритериального выбора, ВКР безопасность информационных систем2 000 ₽ Разработка информационной системы учета трафика в ЛВС компании, Диплом по информатике2 000 ₽
Разработка информационной системы учета трафика в ЛВС компании, Диплом по информатике2 000 ₽Описание
Работа подготовлена и защищена в 2017 году.
Сегодня главным направлением развития промышленности становится автоматизация производства. Она помогает росту эффективности компании благодаря увеличению качества выпускаемой продукции, а также минимизации числа рабочих, занятых в различных сферах производства.
Базовым элементом автоматизации компаний становится применение роботизированных комплексов, включающих манипуляторы и систем управления ими. Внедрение промышленных роботов-манипуляторов помогает уменьшить влияние человеческого фактора в процессе выпуска продукции, увеличить точность реализации технологических операций, в нужной степени понизить воздействие вредных факторов на персонал, сделать компактные производственные помещения и дать бесперебойную работу производства 365 дней в году.
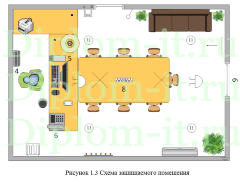
Для обучения специалистов, умеющих работать с роботами манипуляторами, помимо теоретических знаний важно готовить и практические навыки применения подобных устройств. Часто эту проблему трудно решить, предоставляя обучающимся доступ к промышленному оборудованию, ведь их действия могут нанести ущерб и персоналу, и оборудованию. Поэтому важно отработать базовые навыки обращения с манипуляторами, а также действия, которые нужно предпринимать в случае форс-мажорных ситуациях.
Цель проекта - обзор роботов-манипуляторов на базе микропроцессоров.
Широкое применение в промышленности имеют манипуляционные роботы, т. е. роботы, имитирующие действия человеческих рук в процессе трудовой деятельности. Синтез систем управления манипуляционными роботами требует изучения в качестве объектов управления сложных многозвенных механических систем. Развитие теории исполнительных систем роботов ставит новые проблемы перед теоретической механикой, вычислительной математикой, теорией алгоритмов. Эти проблемы порождаются, прежде всего, неизбежным внедрением современной, главным образом цифровой, вычислительной техники как в разработку систем управления роботов, так и в сами процессы управления роботами в реальном масштабе времени.
В настоящей работе исследуется задача о улучшении программного движения двухзвенного манипулятора на основании, совершающем заданное нестационарное поступательное движение в горизонтальной плоскости.
В работе в рамках принципа декомпозиции решена задача об отслеживании заданной траектории двухзвенного манипулятора на подвижном основании. В работах решена задача улучшения программного движения двухзвенного манипулятора с применением вектор-функции Ляпунова и системы сравнения. При этом важна задача построения новых законов управления, простых по структуре, позволяющих решать задачи стабилизации для широкого класса подвижных программных движений.
Характеристики
Год | 2017 |
Программа с исходниками | нет |

Спасибо, работа пришла мгновенно. Буду рекомендовать друзьям.
Обратилась к данному производителю услуг в начале мая. Заказала ВКР, курсовую, отчет по практике, речь и презентацию. Почти 100 % оригинальность. Работают быстро. На вопросы отвечают почти моментально. Слегка переделали презентацию и речь по просьбе преподавателя и то, считаю, что какие то замечания должны были быть. ВКР приняли сразу. Изначально отпугнули низкие звезды на отзовике, но я все поняла вовремя и не жалею. Благодарю Вас!) Буду рекомендовать Вас знакомым!)
Обратилась сюда с очень сложной темой. Сделали диплом за месяц, что для меня было спасением. Ребята — профи, взялись за задачу, которая мне не поддавалась.
Есть небольшой нюанс: из-за сжатых сроков не успели отполировать все детали до идеала. Если планируете заказывать, лучше делать это заранее. Но несмотря на это, работа качественная, и я получила «отлично» на защите.
Огромное вам спасибо! Рекомендую ребят всем, кто попал в трудную ситуацию.
Учусь в МГУ на направлении бизнес-информатика. Сначала сомневалась, получится ли совместить требования методички и мои пожелания по структуре. В работе использовались данные из 1С и элементы анализа в Stata. Несколько раз просила внести изменения, всё сделали корректно. В итоге диплом приняли, а оригинальность оказалась выше 88%.
Писала диплом по праву в УрФУ, тема про цифровые права. Сделали с акцентом на судебную практику, уникальность 90%. Сначала сомневалась в надёжности, но общались в чате, скидывали промежуточные главы. На защите отвечала на вопросы легко, потому что материал был логично выстроен. Рекомендую как проверенный сервис.